ヒューマノイドロボットの自律的動作構成
センサを用いた状態推定と状態グラフ探索による動作計画を組み合わせた人間型ロボットの自律的動作構成方法を研究しています。この手法を発展させて人間型ロボットの様々な環境に接触しながら行う動作の構成方法を研究します。
動画では、転倒したときに、グラフ探索によりどのように動作すれば起き上がれるかが決まります。途中で邪魔をすると、状態が違うことがわかるので、その後経路を再探索して起き上がり状態を目指します。
動画では、転倒したときに、グラフ探索によりどのように動作すれば起き上がれるかが決まります。途中で邪魔をすると、状態が違うことがわかるので、その後経路を再探索して起き上がり状態を目指します。
-
関連論文
- 垣内 洋平ら, "転倒起立動作を可能とする耐荷重接触点を備えた等身大人間型ロボットプラットフォームRHP2の開発", 日本ロボット学会誌 vol. 36, issue 10, pp. 703-712, 2018.
グラフ探索による起き上がり動作
シミュレータを用いた環境認識と歩行動作
ヒューマノイドロボットが環境を認識して動作するシステムについて、シミュレーション上で実機同様なシステムを構築して、認識動作を作ります。
動画では、ロボットカメラによってボールとの距離と方向を認識し、(ボールの色抽出と左右カメラの視差によるステレオ距離認識)ボールを追跡しながら、ボールをゴールへ蹴り入れるシステムを構築しています。
動画では、ロボットカメラによってボールとの距離と方向を認識し、(ボールの色抽出と左右カメラの視差によるステレオ距離認識)ボールを追跡しながら、ボールをゴールへ蹴り入れるシステムを構築しています。
-
関連論文
- Y. Kakiuchi, K. Okada and M. Inaba, "Transparent Integration of Humanoid Robot System for Performing Various Tasks," 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2018, pp. 319-324.
ヒューマノイドロボットによるボールの蹴り入れ
環境認識と歩行動作の統合システム
実際の環境においては、足場が平面でない場合もあり、足場の状態を認識しながら、どこに足をつくか(フットステップ)を探索しながら動作することになります。
また、環境の状況は変化したり、同時に作業を行っていると環境を観察できなかったりしますが、その場合に、認識のアップデートや以前の記憶を用いて適切に歩行移動・タスク実現するための環境認識と歩行動作を統合したシステムについて研究します。
また、環境の状況は変化したり、同時に作業を行っていると環境を観察できなかったりしますが、その場合に、認識のアップデートや以前の記憶を用いて適切に歩行移動・タスク実現するための環境認識と歩行動作を統合したシステムについて研究します。
-
関連論文
- I. Kumagai et al., "Achievement of localization system for humanoid robots with virtual horizontal scan relative to improved odometry fusing internal sensors and visual information," 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 666-673.
頑健な歩行移動システムの構築
ヒューマノイドロボットの操縦・タスク実現
ヒューマノイドロボットで初見の環境においてなんらかのタスクを行わせようとしたときに、どういう指示をだせばよいかについて研究します。ロボット競技会の様々なタスクを例にして、それらをロボットを用いて解決するためのロボットの操縦方法を研究します。
動画は、HVAC (Humanoid Virtual Athletics Challenge) というヒューマノイドロボットの移動の競技会での様子です。現状は環境を認識せずに操縦者が完全に操縦しており、環境は事前に計測していますが、認識や操縦を組み合わせ、初見の環境においても動作できるシステムを構成するための例題と考えています。
動画は、HVAC (Humanoid Virtual Athletics Challenge) というヒューマノイドロボットの移動の競技会での様子です。現状は環境を認識せずに操縦者が完全に操縦しており、環境は事前に計測していますが、認識や操縦を組み合わせ、初見の環境においても動作できるシステムを構成するための例題と考えています。
-
関連論文
- Y. Kojio et al., "Footstep Modification Including Step Time and Angular Momentum Under Disturbances on Sparse Footholds," in IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4907-4914, July 2020.
HVACでの競技例
ゲームデバイスやWebアプリによるロボットの新たな使われ方
一般の方々がサービスロボットを家庭環境において使えるようになるために必要なシステムについて研究します。
ロボットの現在の状態や操縦方法が簡単にわかるように、ゲームデバイスやタブレットを組み合わせて、ゲームのように現実のロボットを操縦し、一度操縦した動作は再度呼び出して簡単に使うようにできる操縦教示システムについて研究します。
また、特殊なデバイスを用いず、PCやスマートフォンなどで操縦できるようにWebベースのアプリケーションとして操縦教示システムを拡張していきます。
ロボットの内部状態や、教示した内容、操縦可能性などを実画像と重ねて表示(AR表示)することによって、ロボットを理解して操縦できるようなシステムとすることを考えています。
ロボットの現在の状態や操縦方法が簡単にわかるように、ゲームデバイスやタブレットを組み合わせて、ゲームのように現実のロボットを操縦し、一度操縦した動作は再度呼び出して簡単に使うようにできる操縦教示システムについて研究します。
また、特殊なデバイスを用いず、PCやスマートフォンなどで操縦できるようにWebベースのアプリケーションとして操縦教示システムを拡張していきます。
ロボットの内部状態や、教示した内容、操縦可能性などを実画像と重ねて表示(AR表示)することによって、ロボットを理解して操縦できるようなシステムとすることを考えています。
-
関連論文
- 石井智也, 東出泰治, 矢野倉伊織, 垣内洋平, 岡田慧, 稲葉雅幸, "スマートフォンによる操作軸自由なエンドエフェクタの位置姿勢操作", 第20回 SICE システムインテグレーション部門講演会講演概要集, 3C1-11, 2019.
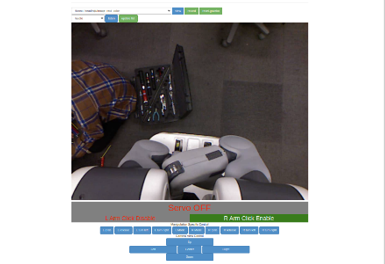
Webベースの操縦教示システム
適応的ロボット創造システム
ロボットによって解決できる課題を増やすために、目的の作業に適したロボットを作り出すシステムについて研究します。
従来型のロボットシステムは、目的に対しロボットを設計し、必要なシステムを構築し提供されるものでしたが、課題を解決するロボットシステムを構成提案してくれるシステムについて研究します。
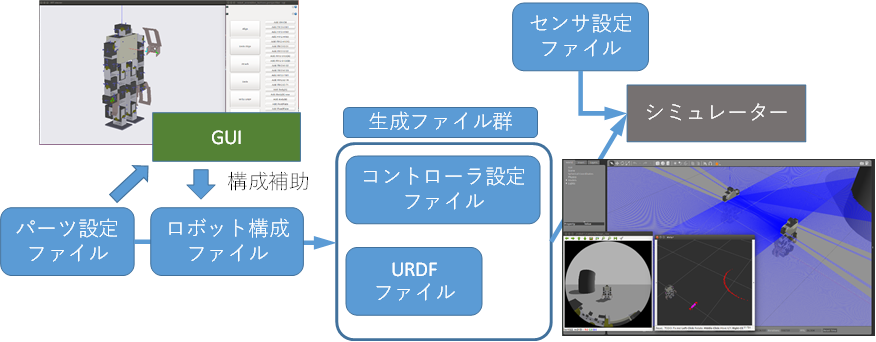
モジュール型のアクチュエータを組み合わせたロボットを簡単に構成し、動作検証できるシステムを構築し、動作検証によりロボットの構成をフィードバックしアップデートすることで、適応的なシステムとします。課題に対して適したロボットの設計を、設計者が行ったデータを蓄積し、自動的にロボットシステム構成を提案できるシステムを目指します。
従来型のロボットシステムは、目的に対しロボットを設計し、必要なシステムを構築し提供されるものでしたが、課題を解決するロボットシステムを構成提案してくれるシステムについて研究します。
モジュール型のアクチュエータを組み合わせたロボットを簡単に構成し、動作検証できるシステムを構築し、動作検証によりロボットの構成をフィードバックしアップデートすることで、適応的なシステムとします。課題に対して適したロボットの設計を、設計者が行ったデータを蓄積し、自動的にロボットシステム構成を提案できるシステムを目指します。
-
関連論文
- 垣内洋平, 岡田慧, 稲葉雅幸, "組立型ロボット構成検証システムの開発とその教育利用", 第38回日本ロボット学会学術講演会講演論文集, 2E1-05, 2020.
モジュール組合せロボット構築システム
GUIによるモジュールを用いたロボットの構成
構成したロボットの認識行動シミュレーション